Deep Learningを用いた隠消現実感透明人間体験
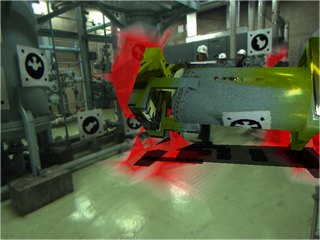
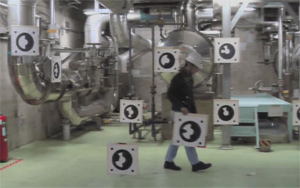
自分の体が透明になった体験ができる隠消現実感システムです。深層学習を応用しています。HMDを被るとカメラで撮影した外界がリアルタイムで見えますが、自分の手や腕は透明になっている様に見えます。深層学習を用いて手の影になっている領域の映像を推定・再構成しており、単に手の部分を一色で塗りつぶしただけのシステムや、完全なVR環境での体験よりも、高いリアリティで透明人間になった感覚を体験できます。
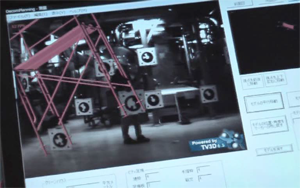
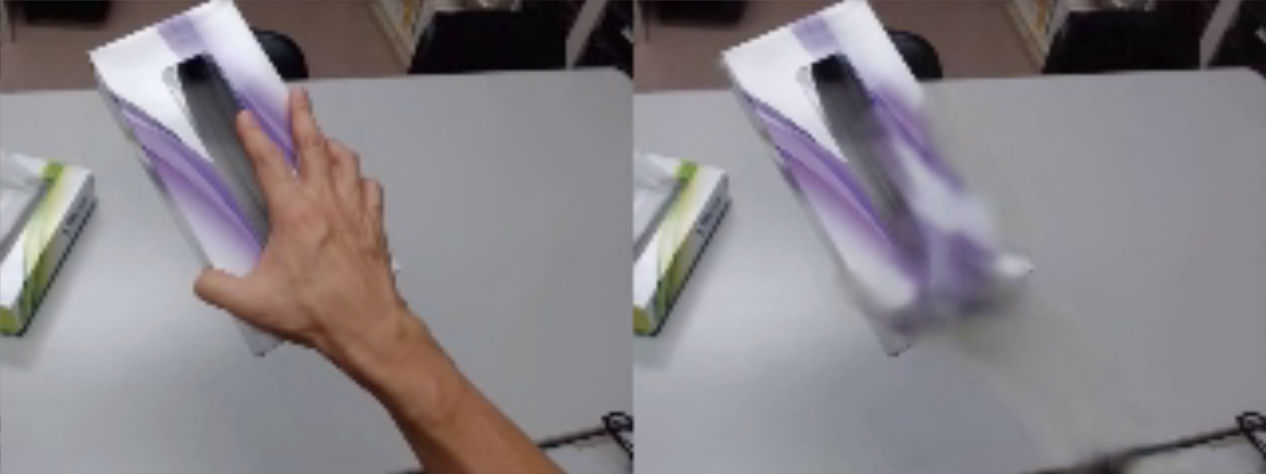
ビデオはこちら(左がカメラの生映像、右がHMDに提示される深層学習で処理した映像)
透明人間体験の例 InvisibleMan.mp4 (14.6MB)
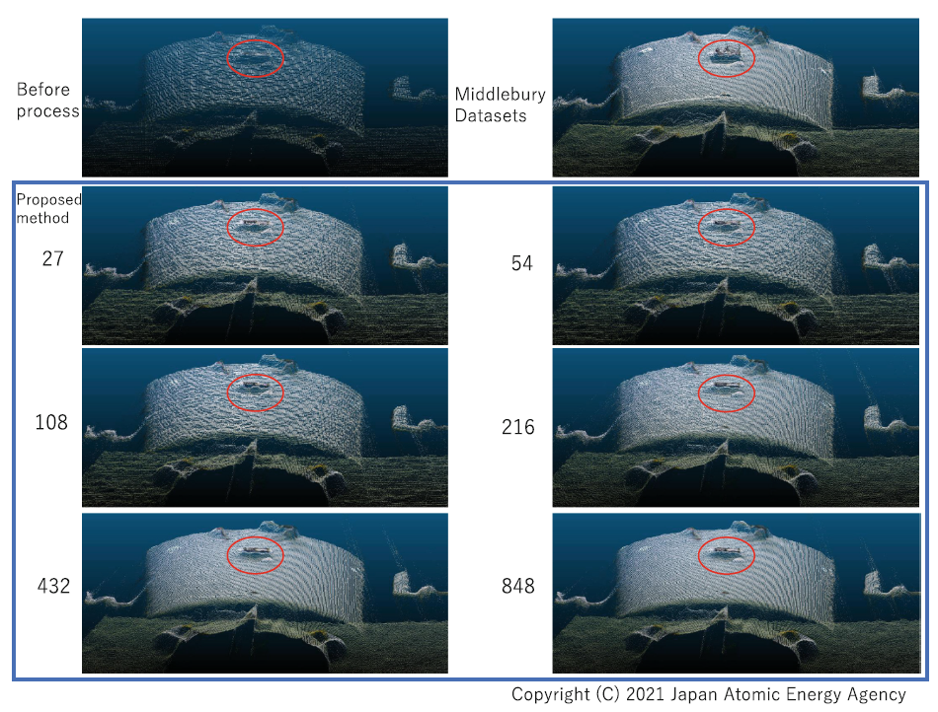
通常のカラー画像に加えて被写体までの距離も測ることができる深度カメラ(RGB-Dカメラ)は、トラッキングや3次元再構成など、様々な応用が考えられていますが、取得される深度画像(距離画像)は抜け落ちが多く、ノイズが多く含まれています。本研究では、深層学習を用いて深度画像のノイズの減らすと共に、解像度を上げる研究を実施しています。