大本 悠輔
「プラント機器の迅速かつ確実な特定のための撮影支援手法の提案と評価」
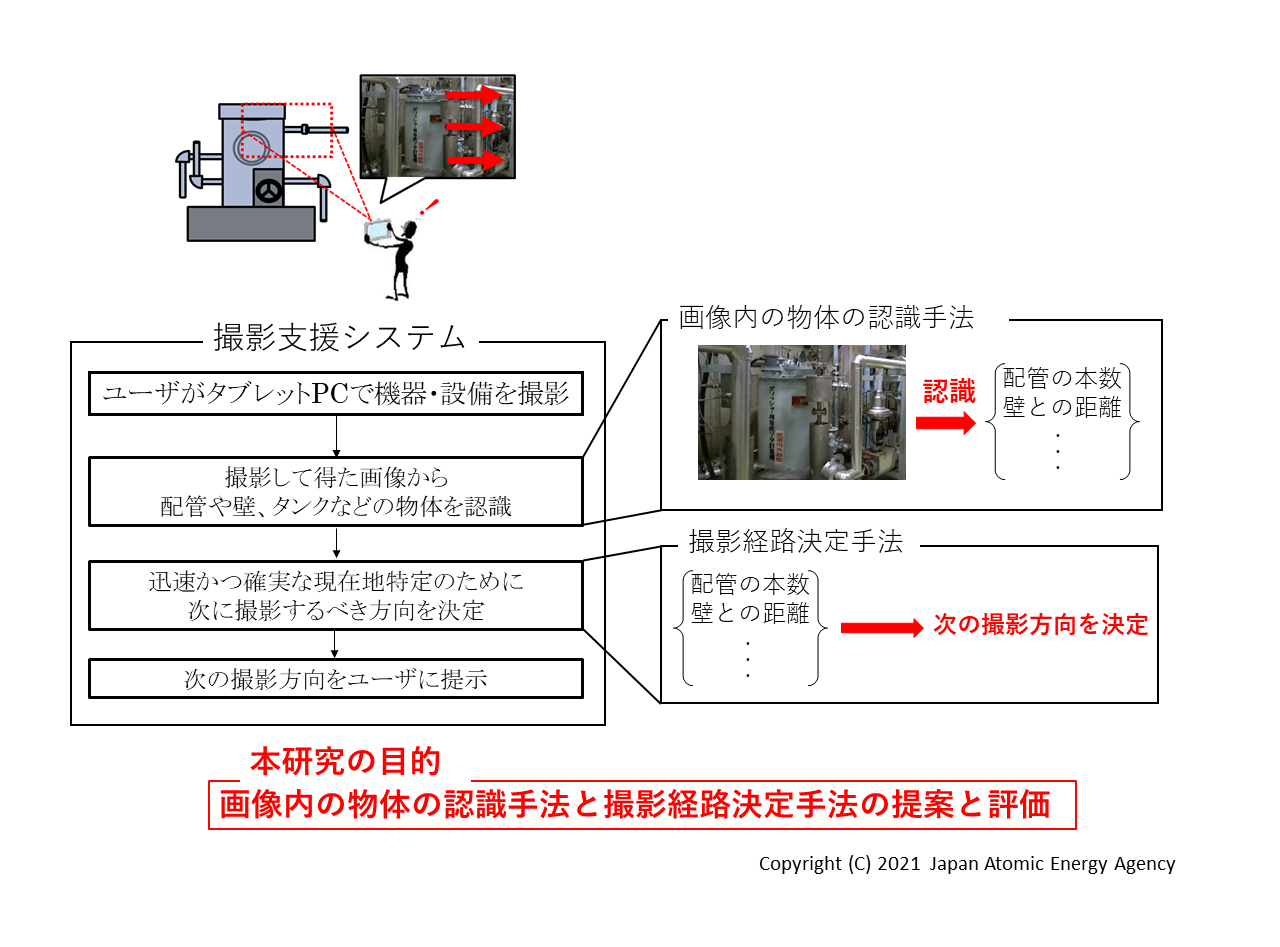
原子力プラントでの保修・解体作業時には作業対象を迅速かつ確実に特定しながら作業を行う必要がある。そのためにカメラで撮影した画像を用いて作業員の現在地を求めることで、目前の機器・設備を特定するという手法が考えられる。しかし1枚の画像で現在地を特定することは難しいため追加で周辺を撮影する必要があるが、特定に繋がるような撮影経路をユーザが判断することは難しい。
そこで特定に繋がるような領域へユーザを誘導するシステムを想定し、本研究では画像に写る物体を認識することで外見的特徴を抽出する手法と、抽出された外見的特徴を用いて迅速な現在地特定のための撮影経路を決定する手法を提案し評価することを目的とした。
画像内物体の認識のためにSemantic Segmentationを用いて物体を分類し、分類結果から配管を認識する手法を開発した。これによりプラント内部の画像から、外見的特徴を抽出できることがわかった。撮影経路決定の際には、ある方向に移動した際に得られる情報エントロピーを計算し、最大となる方向を次の撮影方向とした。人のカメラの動かし方を模擬した撮影経路決定方法と比較した結果、提案した手法では1/3 から1/2 程度の撮影回数で現在地を特定できることがわかった。
論文はこちら→ Omoto.pdf