| 原子力プラントの系統隔離作業支援システムにおける拡張現実感用トラッキング手法の開発 |
| 松井 康治 |
本研究では、原子力プラント機器保守作業を拡張現実感(Augmented Reality:AR)を用いて支援する際に必要となるトラッキング技術の開発を行った。
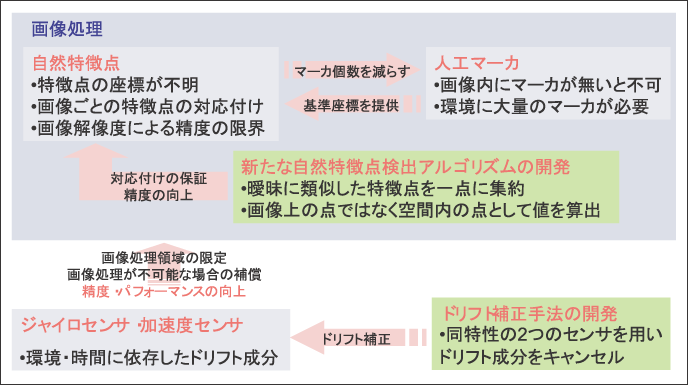
拡張現実感技術を用いて仮想物体を重畳表示するためには、視界画像を取得するカメラと現実世界との位置・姿勢関係を正確に取得する必要がある。このトラッキング技術は、環境や用途に合わせて開発する必要があり、本研究では下図のように、人工マーカ、自然特徴点、ジャイロ・加速度センサを組み合わせたハイブリッドトラッキングを採用した。
これら各トラッキング技術の実装を行い、それらを組み合わせたハイブリッドトラッキングシステムの試作を行った。そして試作したシステムを用いて精度評価を行い、今後の課題と展望をまとめた。
論文はこちら ⇒ matsui.pdf